This is a post about a silly (and mostly pointless) optimization. To motivate this, consider the following problem which you see all the time in mesh processing:
Given a collection of triangles represented as ordered tuples of indices, find all topological duplicates.
By a topological duplicate, we mean that the two faces have the same vertices. Now you aren’t allowed to mutate the faces themselves (since orientation matters), but changing their order in the array is ok. We could also consider a related problem for edges in a graph, or for tetrahedra in mesh.
There are of course many easy ways to solve this, but in the end it basically boils down to finding some function or other for comparing faces up to permutation, and then using either sorting or hashing to check for duplicates. It is that comparison step that I want to talk about today, or in other words:
How do we check if two faces are the same?
In fact, what I really want to talk about is the following more general question where we let the lengths of our faces become arbitrarily large:
Given a pair of arrays, A and B, find a total order  such
such  if and only if
if and only if  up to some permutation
up to some permutation  .
.
For example, we should require that:
[0, 1, 2] [2, 0, 1]
[2, 0, 1] [0, 1, 2]
And for two sequences which are not equal, like [0,1,2] and [3, 4, 5] we want the ordering to be invariant under permutation.
Obvious Solution
An obvious solution to this problem is to sort the arrays element-wise and return the result:
function compareSimple(a, b) {
if(a.length !== b.length) {
return a.length - b.length;
}
var as = a.slice(0)
, bs = b.slice(0);
as.sort();
bs.sort();
for(var i=0; i<a.length; ++i) {
var d = as[i] - bs[i];
if(d) {
return d;
}
}
return 0;
}
This follows the standard C/JavaScript convention for comparison operators, where it returns -1 if a comes before b, +1 if a comes after b and 0 if they are equal. For large enough sequences, this isn’t a bad solution. It takes  time and is pretty straightforward to implement. However, for smaller sequences it is somewhat suboptimal. Most notably, it makes a copy of a and b, which introduces some overhead into the computation and in JavaScript may even trigger a garbage collection event (bad news). If we need to do this on a large mesh, it could slow things down a lot.
time and is pretty straightforward to implement. However, for smaller sequences it is somewhat suboptimal. Most notably, it makes a copy of a and b, which introduces some overhead into the computation and in JavaScript may even trigger a garbage collection event (bad news). If we need to do this on a large mesh, it could slow things down a lot.
An obvious way to fix this would be to try inlining the sorting function for small values of n (which is all we really care about), but doing this yourself is pure punishment. Here is an `optimized` version for length 2 sets:
function compare2Brutal(a, b) {
if(a[0] < a[1]) {
if(b[0] < b[1]) {
if(a[0] === b[0]) {
return a[1] - b[1];
}
return a[0] - b[0];
} else {
if(a[0] === b[1]) {
return a[1] - b[0];
}
return a[0] - b[1];
}
} else {
if(b[0] < b[1]) {
if(a[1] === b[0]) {
return a[0] - b[1];
}
return a[1] - b[0];
} else {
if(a[1] === b[1]) {
return a[0] - b[0];
}
return a[1] - b[1];
}
}
}
If you have any aesthetic sensibility at all, then that code probably makes you want to vomit. And that’s just for length two arrays! You really don’t want to see what the version for length 3 arrays looks like. But it is faster by a wide margin. I ran a benchmark to try comparing how fast these two approaches were at sorting an array of 1000 randomly generated tuples, and here are the results:
- compareSimple: 5864 µs
- compareBrutal: 404 µs
That is a pretty good speed up, but it would be nice if there was a prettier way to do this.
Symmetry
The starting point for our next approach is the following screwy idea: what if we could find a hash function for each face that was invariant under permutations? Or even better, if the function was injective up to permutations, then we could just use the `symmetrized hash` compare two sets. At first this may seem like a tall order, but if you know a little algebra then there is an obvious way to do this; namely you can use the (elementary) symmetric polynomials. Here is how they are defined:
Given a collection of  numbers,
numbers,  the kth elementary symmetric polynomial,
the kth elementary symmetric polynomial,  is the coefficient of
is the coefficient of  in the polynomial:
in the polynomial:

For example, if  , then the symmetric polynomials are just:
, then the symmetric polynomials are just:


And for  we get:
we get:



The neat thing about these functions is that they contain enough data to uniquely determine up to permutation. This is a consequence of the fundamental theorem for elementary symmetric polynomials, which basically says that these polynomials form a complete independent basis for the ring of all symmetric polynomials. Using this trick, we can formulate a simplified version of the sequence comparison for  :
:
function compare2Sym(a, b) {
var d = a[0] + a[1] - b[0] - b[1];
if(d) {
return d;
}
return a[0] * a[1] - b[0] * b[1];
}
Not only is this way shorter than the brutal method, but it also turns out to be a little bit faster. On the same test, I got:
Which is about a 25% improvement over brute force inlining. The same idea extends to higher n, for example here is the result for  :
:
function compare3Sym(a, b) {
var d = a[0] + a[1] + a[2] - b[0] - b[1] - b[2];
if(d) {
return d;
}
d = a[0] * a[1] + a[0] * a[2] + a[1] * a[2] - b[0] * b[1] - b[0] * b[2] - b[1] * b[2];
if(d) {
return d;
}
return a[0] * a[1] * a[2] - b[0] * b[1] * b[2];
}
Running the sort-1000-items test against the simple method gives the following results:
- compareSimple: 7637 µs
- compare3Sym: 352 µs
Computing Symmetric Polynomials
This is all well and good, and it avoids making a copy of the arrays like we used in the basic sorting method. However, it is also not very efficient. If one were to compute the coefficients of a symmetric polynomial directly using the naive method we just wrote, then you would quickly end up with  terms! That is because the number of terms in
terms! That is because the number of terms in  , and so the binomial theorem tells us that:
, and so the binomial theorem tells us that:

A slightly better way to compute them is to use the polynomial formula and apply the FOIL method. That is, we just expand the symmetric polynomials using multiplication. This dynamic programming algorithm speeds up the time complexity to  . For example, here is an optimized version of the case:
. For example, here is an optimized version of the case:
function compare3SymOpt(a,b) {
var l0 = a[0] + a[1]
, m0 = b[0] + b[1]
, d = l0 + a[2] - m0 - b[2];
if(d) {
return d;
}
var l1 = a[0] * a[1]
, m1 = b[0] * b[1];
d = l1 * a[2] - m1 * b[2];
if(d) {
return d;
}
return l0 * a[2] + l1 - m0 * b[2] - m1;
}
For comparison, the first version of compare3 used 11 adds and 10 multiplies, while this new version only uses 9 adds and 6 multiplies, and also has the option to early out more often. This may seem like an improvement, but it turns out that in practice the difference isn’t so great. Based on my experiments, the reordered version ends up taking about the same amount of time overall, more or less:
Which isn’t very good. Part of the reason for the discrepancy most likely has something to do with the way compare3Sym gets optimized. One possible explanation is that the expressions in compare3Sym might be easier to vectorize than those in compare3SymOpt, though I must admit this is pretty speculative.
But there is also a deeper question of can we do better than asumptotically? It turns out the answer is yes, and it requires the following observation:
Polynomial multiplication is convolution.
Using a fast convolution algorithm, we can multiply two polynomials together in time. Combined with a basic divide and conquer strategy, this gives an  algorithm for computing all the elementary symmetric functions. However, this is still worse than sorting the sequences! It feels like we ought to be able to do better, but further progress escapes me. I’ll pose the following question to you readers:
algorithm for computing all the elementary symmetric functions. However, this is still worse than sorting the sequences! It feels like we ought to be able to do better, but further progress escapes me. I’ll pose the following question to you readers:
Question: Can we compute the n elementary symmetric polynomials in time or better?
Overflow
Now there is still a small problem with using symmetric polynomials for this purpose: namely integer overflow. If you have any indices in your tuple that go over 1000 then you are going to run into this problem once you start multiplying them together. Fortunately, we can fix this problem by just working in a ring large enough to contain all our elements. In languages with unsigned 32-bit integers, the natural choice is  , and we get these operations for free just using ordinary arithmetic.
, and we get these operations for free just using ordinary arithmetic.
But life is not so simple in the weird world of JavaScript! It turns out for reasons that can charitably be described as “arbitrary” JavaScript does not support a proper integer data type, and so every number type in the language gets promoted to a double when it overflows whether you like it or not (mostly not). The net result: the above approach messes up. One way to fix this is to try applying a modulus operator at each step, but the results are pretty bad. Here are the timings for a modified version of compare2Sym that enforces bounds:
That’s more than a 5-fold increase in running time, all because we added a few innocent bit masks! How frustrating!
Semirings
The weirdness of JavaScript suggests that we need to find a better approach. But in the world of commutative rings, it doesn’t seem like there are any immediately good alternatives. And so we must cast the net wider. One interesting possibility is to extend our approach to include semirings. A semiring is basically a ring where we don’t require addition to be invertible, hence they are sometimes called “rigs” (which is short for a “ring without negatives”, get it? haha).
Just like a ring, a semiring is basically a set  with a pair of operators
with a pair of operators  that act as generalized addition and multiplication. You also have a pair of elements,
that act as generalized addition and multiplication. You also have a pair of elements,  which act as the additive and multiplicative identity. These things then have to satisfy a list of axioms which are directly analogous to those of the natural numbers (ie nonnegative integers). Here are a few examples of semirings, which you may or may not be familiar with:
which act as the additive and multiplicative identity. These things then have to satisfy a list of axioms which are directly analogous to those of the natural numbers (ie nonnegative integers). Here are a few examples of semirings, which you may or may not be familiar with:
- The complex numbers are semiring (and more generally, so is every field)
- The integers are a semiring (and so is every other ring)
- The natural numbers are a semiring (but not a ring)
- The set of Boolean truth values,
 under the operations OR, AND is a semiring (but is definitely not a ring)
under the operations OR, AND is a semiring (but is definitely not a ring)
- The set of reals under the operations min,max is a semiring (and more generally so is any distributive lattice)
- The tropical semiring, which is the set of reals under (max, +) is a semiring.
In many ways, semirings are more fundamental than rings. After all, we learn to count stuff using the natural numbers long before we learn about integers. But they are also much more diverse, and some of our favorite definitions from ring theory don’t necessarily translate well. For those who are familiar with algebra, probably the most shocking thing is that the concept of an ideal in a ring does not really have a good analogue in the language of semirings, much like how monoids don’t really have any workable generalization of a normal subgroup.
Symmetric Polynomials in Semirings
However, for the modest purposes of this blog post, the most important thing is that we can define polynomials in a semiring (just like we do in a ring) and that we therefore have a good notion of an elementary symmetric polynomial. The way this works is pretty much the same as before:
Let  be a semiring under ; then we have the symmetric functions. Then for two variables, we have the symmetric functions:
be a semiring under ; then we have the symmetric functions. Then for two variables, we have the symmetric functions:


And for we get:



And so on on…
Rank Functions and (min,max)
Let’s look at what happens if we fix a particular semiring, say the (min,max) lattice. This is a semiring over the extended real line  where:
where:
Now, here is a neat puzzle:
Question: What are the elementary symmetric polynomials in this semiring?
Here is a hint:


And…



Give up? These are the rank functions!
Theorem: Over the min,max semiring, is the kth element of the sorted sequence 
In other words, evaluating the symmetric polynomials over the min/max semiring is the same thing as sorting. It also suggests a more streamlined way to do the brutal inlining of a sort:
function compare2Rank(a, b) {
var d = Math.min(a[0],a[1]) - Math.min(b[0],b[1]);
if(d) {
return d;
}
return Math.max(a[0],a[1]) - Math.max(b[0],b[1]);
}
Slick! We went from 25 lines down to just 5. Unfortunately, this approach is a bit less efficient since it does the comparison between a and b twice, a fact which is reflected in the timing measurements:
And we can also easily extend this technique to triples as well:
function compare3Rank(a,b) {
var l0 = Math.min(a[0], a[1])
, m0 = Math.min(b[0], b[1])
, d = Math.min(l0, a[2]) - Math.min(m0, b[2]);
if(d) {
return d;
}
var l1 = Math.max(a[0], a[1])
, m1 = Math.max(b[0], b[1]);
d = Math.max(l1, a[2]) - Math.max(m1, b[2]);
if(d) {
return d;
}
return Math.min(Math.max(l0, a[2]), l1) - Math.min(Math.max(m0, b[2]), m1);
}
- compare3Rank: 618.71 microseconds
The Tropical Alternative
Using rank functions to sort the elements turns out to be much simpler than doing a selection sort, and it is way faster than calling the native JS sort on small arrays while avoiding the overflow problems of integer symmetric functions. However, it is still quite a bit slower than the integer approach.
The final method which I will now describe (and the one which I believe to be best suited to the vagaries of JS) is to compute the symmetric functions over the (max,+), or tropical semiring. It is basically a semiring over the half-extended real line,  with the following operators:
with the following operators:
There is a cute story for why the tropical semiring has such a colorful name, which is that it was popularized at an algebraic geometry conference in Brazil. Of course people have known about (max,+) for quite some time before that and most of the pioneering research into it was done by the mathematician Victor P. Maslov in the 50s. The (max,+) semiring is actually quite interesting and plays an important role in the algebra of distance transforms, numerical optimization and the transition from quantum systems to classical systems.
This is because the (max,+) semiring works in many ways like the large scale limit of the complex numbers under addition and multiplication. For example, we all know that:

But did you also know that:

This basically a formalization of that time honored engineering philosophy that once your numbers get big enough, you can start to think about them on a log scale. If you do this systematically, then you eventually will end up doing arithmetic in the (max,+)-semiring. Masolv asserts that this is essentially what happens in quantum mechanics when we go from small isolated systems to very big things. A brief overview of this philosophy that has been translated to English can be found here:
Litvinov, G. “The Maslov dequantization, idempotent and tropical mathematics: a very brief introduction” (2006) arXiv:math/0501038
The more detailed explanations of this are unfortunately all store in thick, inscrutable Russian text books (but you can find an English translation if you look hard enough):
Maslov, V. P.; Fedoriuk, M. V. “Semiclassical approximation in quantum mechanics”
But enough of that digression! Let’s apply (max,+) to the problem at hand of comparing sequences. If we expand the symmetric polynomials in the (max,+) world, here is what we get:


And for :



If you stare at this enough, I am sure you can spot the pattern:
Theorem: The elementary symmetric polynomials on the (max,+) semiring are the partial sums of the sorted sequence.
This means that if we want to compute the (max,+) symmetric polynomials, we can do it in by sorting and folding.
Working the (max,+) solves most of our woes about overflow, since adding numbers is much less likely to go beyond INT_MAX. However, we will tweak just one thing: instead of using max, we’ll flip it around and use min so that the values stay small. Both theoretically and practically, it doesn’t save much but it gives us a maybe a fraction of a bit of extra address space to use for indices. Here is an implementation for pairs:
function compare2MinP(a, b) {
var d = a[0]+a[1]-b[0]-b[1];
if(d) {
return d;
}
return Math.min(a[0],a[1]) - Math.min(b[0],b[1]);
}
And it clocks in at:
Which is a bit slower than the symmetric functions, but still way faster than ranking. We can also play the same game for :
function compare3MinP(a, b) {
var l1 = a[0]+a[1]
, m1 = b[0]+b[1];
d = l1+a[2] - (m1+b[2]);
if(d) {
return d;
}
var l0 = Math.min(a[0], a[1])
, m0 = Math.min(b[0], b[1])
, d = Math.min(l0, a[2]) - Math.min(m0, b[2]);
if(d) {
return d;
}
return Math.min(l0+a[2], l1) - Math.min(m0+b[2], m1);
}
Which hits:
Again, not quite as fast as integers, but pretty good for JavaScript.
Summary
You can get all the code to run these experiments on github:
https://github.com/mikolalysenko/set-compare
And here are the results that I got from running the experiment, all collated for easy reading:
Dimension = 2
- compareSimple: 5982 µs
- compare2Brutal: 415 µs
- compare2Sym: 352 µs
- compare2SymMasked: 1737 µs
- compare2Rank: 498 µs
- compare2MinP: 369 µs
Dimension = 3
- compareSimple: 7737 µs
- compare3Sym: 361 µs
- compare3Sym_opt: 362 µs
- compare3Rank: 612 µs
- compare3MinP: 377 µs
As you can see, the (min,+) solution is nearly as fast as the symmetric version without having the same overflow problems.
I hope you enjoyed reading this as much as I enjoyed tinkering around! Of course I still don’t know of an optimal way to compare two lists. As a final puzzle, I leave you with the following:
Question: Is there any method which can test if two unordered sequences are equal in linear time and at most log space?
Frankly, I don’t know the answer to this question and it may very well be impossible. If you have any thoughts or opinions on this, please leave a comment!
 distance transforms
distance transforms (where
(where  is the dimension of the ndarray) due to the extra indexing and multiplication required. To avoid doing this, we can compute the index into the underlying array incrementally. As a sketch of how this works, consider the following psuedocode:
is the dimension of the ndarray) due to the extra indexing and multiplication required. To avoid doing this, we can compute the index into the underlying array incrementally. As a sketch of how this works, consider the following psuedocode: words at a time. This is basically a block IO version of the RAM model, and accurately models many realistic algorithms. In general, the running time of an algorithm on the RAM model is an upper bound on its running time in the two-level model, and the fastest that we can ever speed up an algorithm in the two level model is by a factor of
words at a time. This is basically a block IO version of the RAM model, and accurately models many realistic algorithms. In general, the running time of an algorithm on the RAM model is an upper bound on its running time in the two-level model, and the fastest that we can ever speed up an algorithm in the two level model is by a factor of  .
.![O(1 + \frac{\text{shape}[0]\text{shape}[1] }{B})](https://s0.wp.com/latex.php?latex=O%281+%2B+%5Cfrac%7B%5Ctext%7Bshape%7D%5B0%5D%5Ctext%7Bshape%7D%5B1%5D+%7D%7BB%7D%29&bg=ffffff&fg=1a1a1a&s=0&c=20201002) . On the other hand, if the arrays were stored in column major order and if we looped over them in the same order, then we would get no advantage from blocked IO operations and so the cost of executing the algorithm would be
. On the other hand, if the arrays were stored in column major order and if we looped over them in the same order, then we would get no advantage from blocked IO operations and so the cost of executing the algorithm would be ![O( \text{shape}[0] \text{shape}[1] )](https://s0.wp.com/latex.php?latex=O%28+%5Ctext%7Bshape%7D%5B0%5D+%5Ctext%7Bshape%7D%5B1%5D+%29&bg=ffffff&fg=1a1a1a&s=0&c=20201002) .
. words at a time. We assume that accessing cache is infinitely fast, and so the time complexity of any algorithm in the external memory model is bounded by the number of reads/writes to the external memory source.
words at a time. We assume that accessing cache is infinitely fast, and so the time complexity of any algorithm in the external memory model is bounded by the number of reads/writes to the external memory source. , then this approach can be used to speed up any array operation by a factor
, then this approach can be used to speed up any array operation by a factor ![O(1+\frac{\text{shape}[0]\text{shape}[1]}{B})](https://s0.wp.com/latex.php?latex=O%281%2B%5Cfrac%7B%5Ctext%7Bshape%7D%5B0%5D%5Ctext%7Bshape%7D%5B1%5D%7D%7BB%7D%29&bg=ffffff&fg=1a1a1a&s=0&c=20201002) block memory transfers if the cache is at least
block memory transfers if the cache is at least  . It is also pretty easy to generalize this idea to multiple arrays with higher dimensions, which again performs optimally assuming that
. It is also pretty easy to generalize this idea to multiple arrays with higher dimensions, which again performs optimally assuming that  where n is the number of arguments and d is the dimension of the arrays.
where n is the number of arguments and d is the dimension of the arrays.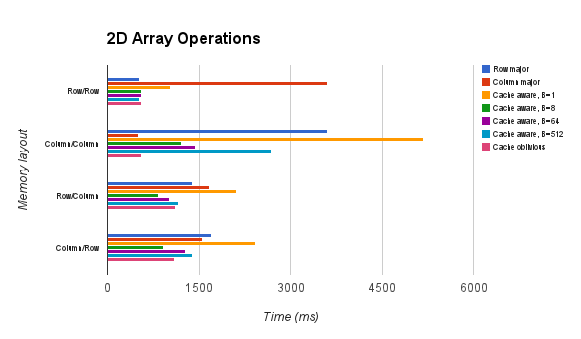
 extra bytes worth of memory in pointers and intermediate arrays. Additionally, accessing an element in an array-of-arrays requires
extra bytes worth of memory in pointers and intermediate arrays. Additionally, accessing an element in an array-of-arrays requires 








 is the state field and that we have two effective fields which are computed from f:
is the state field and that we have two effective fields which are computed from f:






![[b_1, b_2]](https://s0.wp.com/latex.php?latex=%5Bb_1%2C+b_2%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) : The fraction of living neighbors required for a cell to stay alive (typically
: The fraction of living neighbors required for a cell to stay alive (typically ![[\frac{2}{8}, \frac{3}{8}]](https://s0.wp.com/latex.php?latex=%5B%5Cfrac%7B2%7D%7B8%7D%2C+%5Cfrac%7B3%7D%7B8%7D%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) ).
).![[d_1, d_2]](https://s0.wp.com/latex.php?latex=%5Bd_1%2C+d_2%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) : The fraction of living neighbors required for a cell to be born (typically
: The fraction of living neighbors required for a cell to be born (typically  ).
). : The transition smoothness from live to dead (arbitrary, but Rafler uses
: The transition smoothness from live to dead (arbitrary, but Rafler uses  ).
). : Transition smoothness from interval boundary (again, arbitrary but usually about
: Transition smoothness from interval boundary (again, arbitrary but usually about  ).
). : The size of the effective neighborhood (this is a simulation dependent scale parameter, and should not effect the asymptotic behavior of the system).
: The size of the effective neighborhood (this is a simulation dependent scale parameter, and should not effect the asymptotic behavior of the system). is just:
is just:
![d(p,q) = \min \limits_{f : [0,1] \to \mathbb{R}^2\\f(0)=p, f(1)=q} \int \limits_0^1 |\partial_t f(t)| dt](https://s0.wp.com/latex.php?latex=d%28p%2Cq%29+%3D+%5Cmin+%5Climits_%7Bf+%3A+%5B0%2C1%5D+%5Cto+%5Cmathbb%7BR%7D%5E2%5C%5Cf%280%29%3Dp%2C+f%281%29%3Dq%7D+%5Cint+%5Climits_0%5E1+%7C%5Cpartial_t+f%28t%29%7C+dt&bg=ffffff&fg=1a1a1a&s=0&c=20201002)


 , a Riemannian metric continuously assigns to every point
, a Riemannian metric continuously assigns to every point  a
a  on the
on the ![f : [0,1] \to M](https://s0.wp.com/latex.php?latex=f+%3A+%5B0%2C1%5D+%5Cto+M&bg=ffffff&fg=1a1a1a&s=0&c=20201002) , then we can just define the arclength of f to be:
, then we can just define the arclength of f to be:
![d(p,q)=\min \limits_{\begin{array}{c} f : [0,1] \to M, \\ f(0) = p, f(1)=q\end{array}} \int_0^1 \sqrt{g_{f(t)} \left( \frac{d f}{dt}, \frac{d f}{dt} \right)} dt](https://s0.wp.com/latex.php?latex=d%28p%2Cq%29%3D%5Cmin+%5Climits_%7B%5Cbegin%7Barray%7D%7Bc%7D+f+%3A+%5B0%2C1%5D+%5Cto+M%2C+%5C%5C+f%280%29+%3D+p%2C+f%281%29%3Dq%5Cend%7Barray%7D%7D+%5Cint_0%5E1+%5Csqrt%7Bg_%7Bf%28t%29%7D+%5Cleft%28+%5Cfrac%7Bd+f%7D%7Bdt%7D%2C+%5Cfrac%7Bd+f%7D%7Bdt%7D+%5Cright%29%7D+dt&bg=ffffff&fg=1a1a1a&s=0&c=20201002)



 and taking a flat metric. However, there is a major departure in that the very same equations can now be used to describe the dynamics of life on curved surfaces as well!
and taking a flat metric. However, there is a major departure in that the very same equations can now be used to describe the dynamics of life on curved surfaces as well! and a smooth map
and a smooth map  with a metric
with a metric  on
on  , then
, then  induces a metric on
induces a metric on  be the differential of
be the differential of  on
on  :
:
 that takes our surface and sticks it into 3-space with the ordinary flat Euclidean metric. Then the geodesic distance is just the length of the shortest path in the surface:
that takes our surface and sticks it into 3-space with the ordinary flat Euclidean metric. Then the geodesic distance is just the length of the shortest path in the surface:![d(p,q) = \min_{f : [0,1] \to \Omega \\ f(0)=p, f(1)=q} \int_0^1 | \frac{d h(f(t))}{dt} | dt](https://s0.wp.com/latex.php?latex=d%28p%2Cq%29+%3D+%5Cmin_%7Bf+%3A+%5B0%2C1%5D+%5Cto+%5COmega+%5C%5C+f%280%29%3Dp%2C+f%281%29%3Dq%7D+%5Cint_0%5E1+%7C+%5Cfrac%7Bd+h%28f%28t%29%29%7D%7Bdt%7D+%7C+dt&bg=ffffff&fg=1a1a1a&s=0&c=20201002)
 vertices could have
vertices could have  , (the extra log factor is due to the cost associated with maintaining an ordered list for visiting the edges.)
, (the extra log factor is due to the cost associated with maintaining an ordered list for visiting the edges.) piecewise linear or `tent’ functions for my basis functions:
piecewise linear or `tent’ functions for my basis functions:
 :
:
 respectively. Using this coordinate system it is really easy to define a linear scalar function on
respectively. Using this coordinate system it is really easy to define a linear scalar function on  . Pick any 3 weights
. Pick any 3 weights  and define a map
and define a map  according to the rule:
according to the rule:
 and
and  faces,
faces,  where each face,
where each face,  is a 3-tuple of indices into
is a 3-tuple of indices into ![\alpha_0, \alpha_1, ... \alpha_{n-1} \in [0,1]](https://s0.wp.com/latex.php?latex=%5Calpha_0%2C+%5Calpha_1%2C+...+%5Calpha_%7Bn-1%7D+%5Cin+%5B0%2C1%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) and for every face we add a constraint:
and for every face we add a constraint:
 which is the parameter space for our mesh. To define a piecewise linear scalar field on
which is the parameter space for our mesh. To define a piecewise linear scalar field on  , we just need to pick
, we just need to pick  , analgous to the triangular case:
, analgous to the triangular case:
 . To see what this looks like visually, here is another helpful picture from wikipedia:
. To see what this looks like visually, here is another helpful picture from wikipedia:
 . These vertex weights determine an embedding of our mesh in 3D space according to the rule
. These vertex weights determine an embedding of our mesh in 3D space according to the rule 

 , we want to compute:
, we want to compute:
 is piecewise linear over the mesh and instead performing the integration face-by-face.
is piecewise linear over the mesh and instead performing the integration face-by-face. 
 is that every term is 0 except for the
is that every term is 0 except for the  components, which are set to
components, which are set to  respectively.
respectively.
 is just the indicator function for the geodesic ball centered at x with radius h, and is computed using the geodesic distance field we described above. To actually evaluate the integral, let us suppose that
is just the indicator function for the geodesic ball centered at x with radius h, and is computed using the geodesic distance field we described above. To actually evaluate the integral, let us suppose that 



 .
.


 at each vertex requires doing quadratic work. Instead, it is better if we precalculate a bit to avoid doing so many redundant computations. To understand how this works, observe that our rule for computing the quantities
at each vertex requires doing quadratic work. Instead, it is better if we precalculate a bit to avoid doing so many redundant computations. To understand how this works, observe that our rule for computing the quantities  is linear in the vector
is linear in the vector  . This means that we can write it as a matrix:
. This means that we can write it as a matrix:
 are the vectors of coefficients and
are the vectors of coefficients and  is the matrix which we precalculate whose entries using the formula:
is the matrix which we precalculate whose entries using the formula:
 (which I wrote as
(which I wrote as  to save space), with quadrature computed as described above. Since the outer radius for the cells are finite,
to save space), with quadrature computed as described above. Since the outer radius for the cells are finite,  . Putting this together, we get the following algorithm:
. Putting this together, we get the following algorithm:




 on the plane. Now here is the trick: Instead of thinking of this is an infinite grid of infinitesimal cells, we give the cells a small — but finite! — length. To do this, pick any small positive real number h which will act as the radius of a single cell (ie “the Planck length” for the simulation). Then we define the state of the `effective cell‘ at a point x as the average of the field over a radius h neighborhood around x, (which we call M(x,t) following the conventions in Rafler’s paper):
on the plane. Now here is the trick: Instead of thinking of this is an infinite grid of infinitesimal cells, we give the cells a small — but finite! — length. To do this, pick any small positive real number h which will act as the radius of a single cell (ie “the Planck length” for the simulation). Then we define the state of the `effective cell‘ at a point x as the average of the field over a radius h neighborhood around x, (which we call M(x,t) following the conventions in Rafler’s paper):


 ) and that N, M, give the state of each cell and the number of live cells in the 1-radius
) and that N, M, give the state of each cell and the number of live cells in the 1-radius 


 does if we plot it, taking
does if we plot it, taking  :
:
 from x = -6 to 6. Image (c) Wikipedia 2008. Author Geoff Richards.
from x = -6 to 6. Image (c) Wikipedia 2008. Author Geoff Richards. determines how quickly the sigmoid `steps’ from 0 to 1, while the parameter a shifts the sigmoid. Using a sigmoid, we can represent 0/1, alive/dead state of a cell in the effective field by thresholding:
determines how quickly the sigmoid `steps’ from 0 to 1, while the parameter a shifts the sigmoid. Using a sigmoid, we can represent 0/1, alive/dead state of a cell in the effective field by thresholding:

 selects between a and b depending on whether the cell is dead or alive respectively. The other thing we will need is a way to smoothly threshold an interval. Fortunately, we can also do this using
selects between a and b depending on whether the cell is dead or alive respectively. The other thing we will need is a way to smoothly threshold an interval. Fortunately, we can also do this using  . For example, we could define:
. For example, we could define:

 for n=0 to 1
for n=0 to 1
![[b_1, d_1], [b_2, d_2]](https://s0.wp.com/latex.php?latex=%5Bb_1%2C+d_1%5D%2C+%5Bb_2%2C+d_2%5D&bg=ffffff&fg=1a1a1a&s=0&c=20201002) are a pair of intervals which are selected based on user specified parameters. Based on the game of life, a reasonable set of choices should be
are a pair of intervals which are selected based on user specified parameters. Based on the game of life, a reasonable set of choices should be  , which if plotted gives a chart that looks something like this:
, which if plotted gives a chart that looks something like this:
 for their appearance in
for their appearance in  respectively. Along with the bounds for the the life/death intervals
respectively. Along with the bounds for the the life/death intervals  , there are 6 total parameters to choose from in building a cellular automaton for SmoothLife.
, there are 6 total parameters to choose from in building a cellular automaton for SmoothLife.

 (which I will deliberately leave unspecified for now):
(which I will deliberately leave unspecified for now):
 . For example, we could represent f as a polynomial series expansion, in which case
. For example, we could represent f as a polynomial series expansion, in which case  and the weights would just be the coefficients,
and the weights would just be the coefficients,  . But there is no reason to stop at polynomials, we could approximate f by whatever functions we find convenient (and later on we’ll discuss a few reasonable choices.) What does this buy us? Well if we use a finite number of basis elements,
. But there is no reason to stop at polynomials, we could approximate f by whatever functions we find convenient (and later on we’ll discuss a few reasonable choices.) What does this buy us? Well if we use a finite number of basis elements,  at time t, and supposing that at time t+1 we have
at time t, and supposing that at time t+1 we have  , all we need to do is solve for the coefficients
, all we need to do is solve for the coefficients  . This could be done (hypothetically) by just plugging in f(x,t), f(x,t+1) into both sides of Rafler’s SmoothLife update equation:
. This could be done (hypothetically) by just plugging in f(x,t), f(x,t+1) into both sides of Rafler’s SmoothLife update equation:


 error in some suitable metric. For example, we could try to solve the following the following optimization problem instead:
error in some suitable metric. For example, we could try to solve the following the following optimization problem instead:



 . This square is compact and so we have at least some hope of being able to approximate a periodic f by some finite number of functions covering this square.
. This square is compact and so we have at least some hope of being able to approximate a periodic f by some finite number of functions covering this square.
 with:
with: .
.
 are just the values of the function at the grid points:
are just the values of the function at the grid points:




 is a finite sum. Therefore:
is a finite sum. Therefore:
 can be computed in closed form using Bessel functions. This means that:
can be computed in closed form using Bessel functions. This means that:

 be the new weights for f at time t+1. Then to do a discrete time step we just set:
be the new weights for f at time t+1. Then to do a discrete time step we just set:







 .
.
 , is visually consistent. So suppose by contradiction that it is not; then there exists some point
, is visually consistent. So suppose by contradiction that it is not; then there exists some point  . But by definition, there must be some visually consistent set
. But by definition, there must be some visually consistent set  containing
containing  . However, since
. However, since  is visible is a super set of the views containing it in
is visible is a super set of the views containing it in 











 regular grid, f, we project it down to a
regular grid, f, we project it down to a  grid f’ according to the rule:
grid f’ according to the rule:








 , be a pair of shifted
, be a pair of shifted 

 , we’d get:
, we’d get:
 in red, and the shallower potential
in red, and the shallower potential  in blue. One can check that their zero-sublevel sets coincide:
in blue. One can check that their zero-sublevel sets coincide:






































 , a class of simpler shapes
, a class of simpler shapes  such that
such that  is minimized:
is minimized:
 which is the best approximation of
which is the best approximation of  . This is probably the fastest method I’ve seen for simplifying an isosurface, but the speed comes at the cost of greater implementation complexity. But, if you are planning on doing mesh simplification, and you feel confident in your coding skills, then there is no practical reason not to use this technique.
. This is probably the fastest method I’ve seen for simplifying an isosurface, but the speed comes at the cost of greater implementation complexity. But, if you are planning on doing mesh simplification, and you feel confident in your coding skills, then there is no practical reason not to use this technique.